What Makes a Robot?
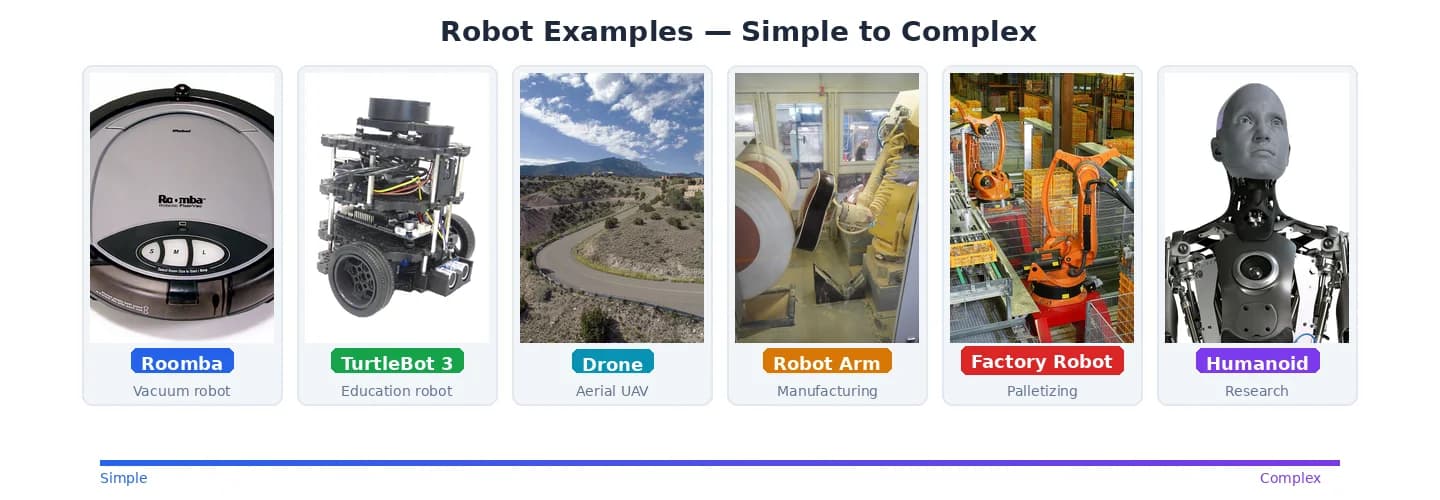
You've probably seen robots in movies — humanoid machines with glowing eyes and questionable motives. Real robots are usually less dramatic but far more interesting. They're the machines that vacuum your floor, weld car frames, explore Mars, and perform surgery with millimeter precision.

So what actually makes something a robot? Let's break it down.
The Three Ingredients
Every robot, from a $30 kit to a million-dollar industrial arm, has three essential parts:
- Sensors — how the robot perceives the world
- Actuators — how the robot acts on the world
- Software — the brain that connects perception to action
That's it. A camera sees an obstacle, the software decides to turn left, and a motor executes the turn. This loop — sense, think, act — is the heartbeat of every robot.
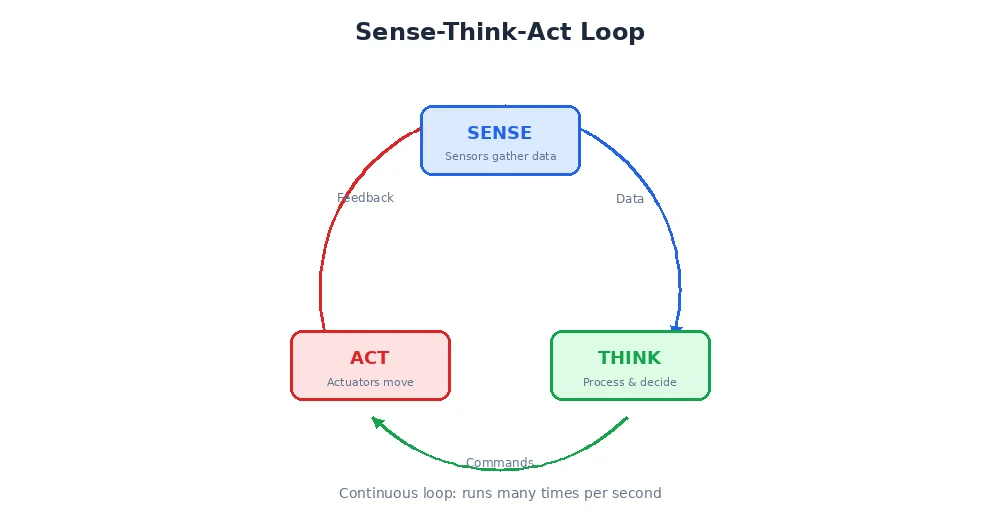
A common way to remember this is the STA loop: Sense → Think → Act. Every piece of robot software fits somewhere in this loop.
Sensors: The Robot's Senses
Sensors are how a robot gathers information about its environment. Here are the most common ones:
| Sensor | What it measures | Example use |
|---|---|---|
| Camera | Images (RGB pixels) | Object detection, visual navigation |
| LiDAR | Distance (laser pulses) | 3D mapping, obstacle avoidance |
| IMU | Orientation & acceleration | Balance, dead reckoning |
| Encoder | Wheel/joint rotation | Odometry, joint position |
| Ultrasonic | Distance (sound pulses) | Simple obstacle detection |
Each sensor has trade-offs. Cameras give rich detail but struggle in the dark. LiDAR works in any lighting but can't read text. Good robot design means choosing the right sensors for the job — and usually combining several.
Actuators: Making Things Move
Actuators convert electrical signals into physical motion. The most common types:
- DC Motors — continuous rotation, used for wheels and propellers
- Servo Motors — precise angle control, used for robot arms and steering
- Stepper Motors — exact step-by-step rotation, used in 3D printers
- Linear Actuators — push/pull in a straight line, used for grippers
Software: The Brain
The software is where the magic happens. It takes raw sensor data, processes it into understanding, makes decisions, and sends commands to actuators.
Modern robot software is almost always modular — built from small, independent pieces that communicate with each other. One piece handles the camera, another plans paths, another controls motors. They talk through messages, passing data back and forth.
This modular approach means you can swap out one piece (say, upgrading from a basic obstacle detector to a neural network) without rewriting everything else.
A Real Example
Consider a delivery robot navigating a sidewalk:

- Camera spots a pedestrian ahead
- LiDAR confirms the distance: 3 meters
- Software decides: slow down and steer right
- Motors execute: reduce speed, turn wheels
This entire cycle happens many times per second. The faster and more reliably this loop runs, the better the robot performs.


What's NOT a Robot?
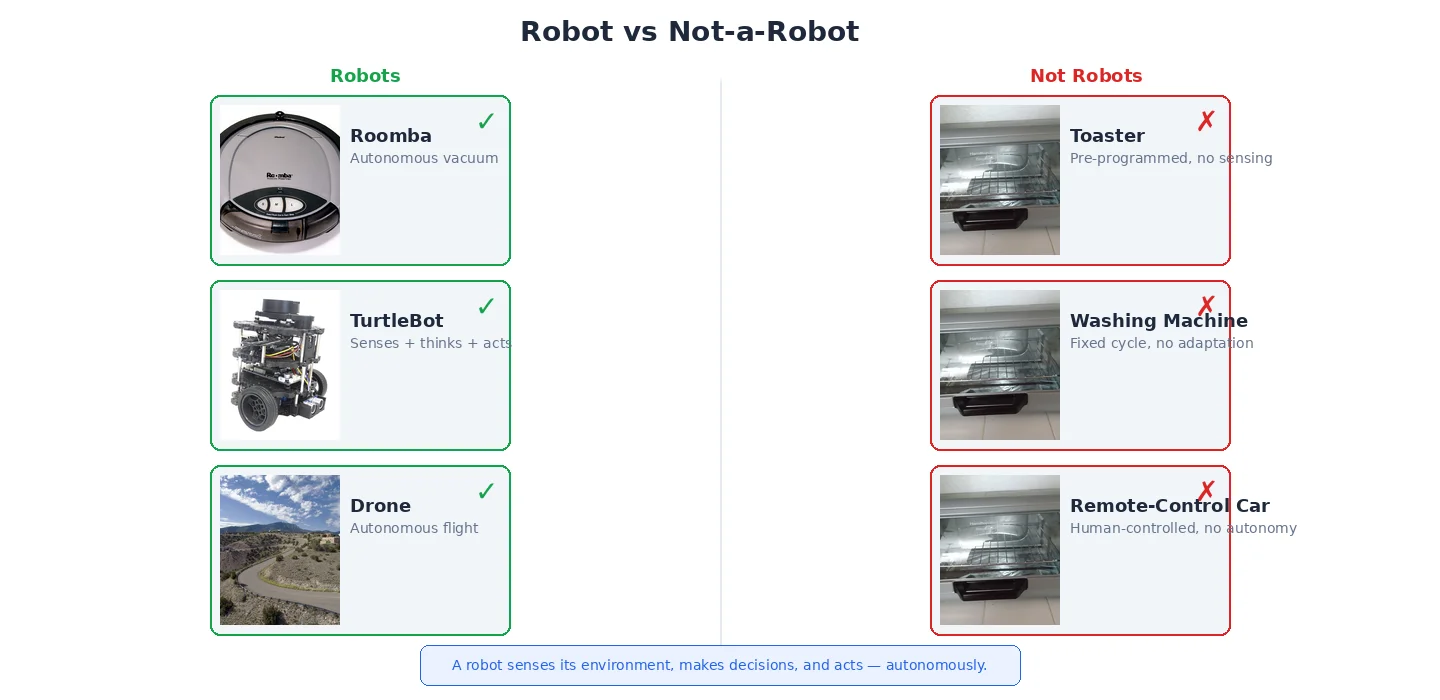
Not everything with a motor is a robot. A washing machine has sensors (water level) and actuators (motor) but follows a fixed program — it doesn't adapt to its environment. A robot, by most definitions, must:
- Sense its environment
- Make decisions based on what it senses
- Act on those decisions
- Do this autonomously (at least partially)
The line gets blurry with things like remote-controlled drones (partially autonomous) or smart thermostats (sense and act, but very limited). And that's fine — robotics is a spectrum, not a box.
What's Next?
In the next lesson, we'll take a closer look at sensors and actuators — how they actually work, what data they produce, and how to choose the right ones for your robot.