State Machines
A finite state machine (FSM) is a model of computation with a fixed set of states and rules for transitioning between them. At any moment, the robot is in exactly one state.
The Basics
Think of a traffic light:
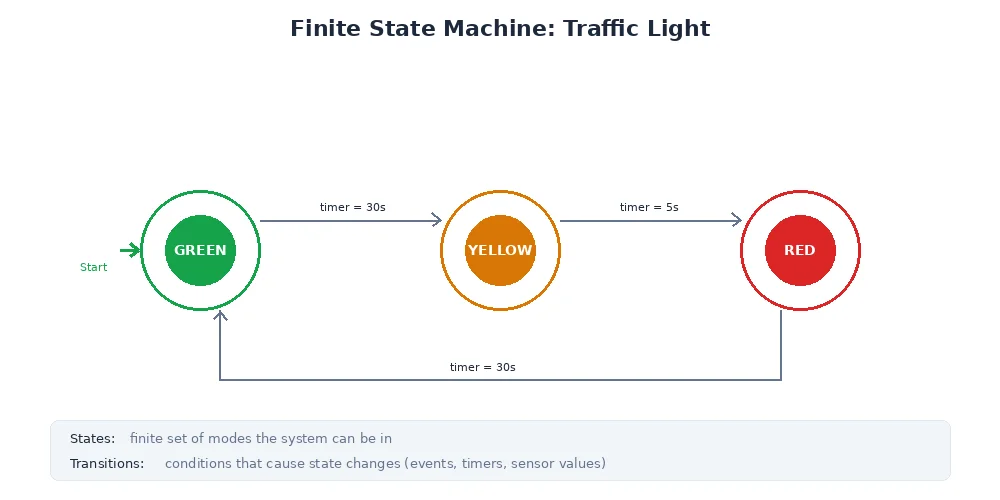
At any moment, the light is in exactly one state. When a condition is met (a timer expires), it transitions to a new state.
Anatomy of a State Machine
- States — discrete modes of operation (e.g., Idle, Navigating, Charging, Error)
- Transitions — arrows between states that define when to switch
- Guards — conditions that must be true for a transition to fire (e.g.,
battery < 20%) - Actions — code that runs when entering/exiting a state or during a transition
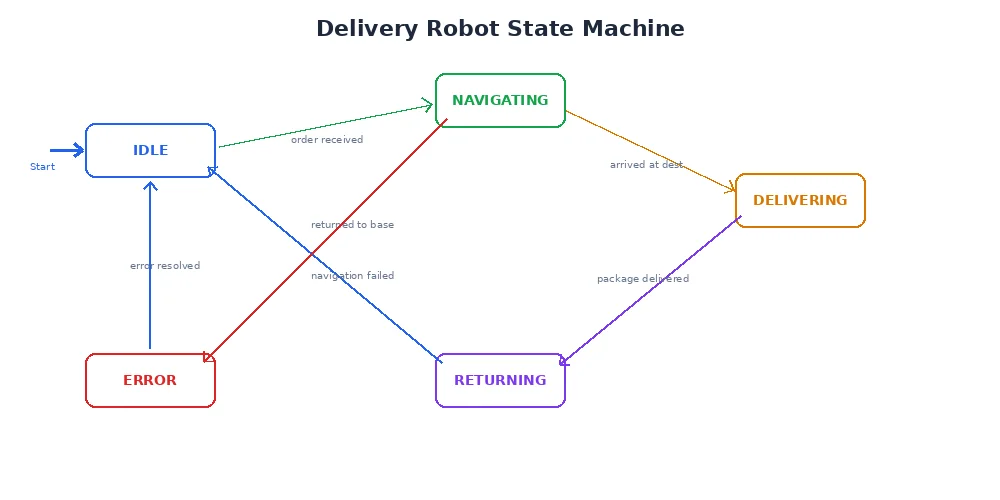
Example: Delivery Robot
Let's design a simple delivery robot with four states:
class DeliveryRobot:
def __init__(self):
self.state = "IDLE"
self.battery = 100
self.mission_complete = False
def update(self):
# State: IDLE
if self.state == "IDLE":
if self.mission_received():
self.transition_to("NAVIGATING")
# State: NAVIGATING
elif self.state == "NAVIGATING":
self.move_toward_goal()
if self.battery < 20:
self.transition_to("CHARGING")
elif self.reached_goal():
self.mission_complete = True
self.transition_to("IDLE")
# State: CHARGING
elif self.state == "CHARGING":
self.dock_at_charger()
self.battery += 1 # charge rate
if self.battery >= 100:
if self.mission_complete:
self.transition_to("IDLE")
else:
self.transition_to("NAVIGATING")
def transition_to(self, new_state):
print(f"Transition: {self.state} → {new_state}")
self.on_exit(self.state)
self.state = new_state
self.on_enter(new_state)
def on_enter(self, state):
if state == "NAVIGATING":
print("Starting navigation...")
elif state == "CHARGING":
print("Docking at charger...")
def on_exit(self, state):
if state == "NAVIGATING":
print("Stopping navigation.")
Guards and Transitions
A guard is a boolean condition that must be true for a transition to fire. In the example above:
battery < 20is a guard on the transition fromNAVIGATING→CHARGINGbattery >= 100 and mission_completeis a guard onCHARGING→IDLE
Guards prevent invalid transitions. Without them, you'd need messy nested ifs to check every condition.
Hierarchical State Machines
Real robots need more structure. A hierarchical FSM lets you nest states within states.
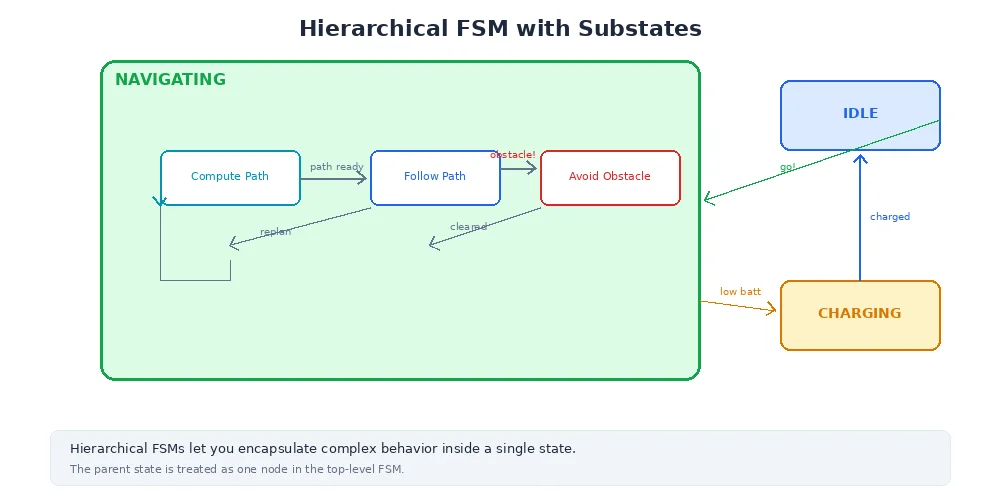
When you're in FOLLOWING_PATH, you're also in NAVIGATING and OPERATING. This means:
- You can define a transition from any
OPERATINGstate toERROR(e.g., on sensor failure) - You don't need to duplicate "on sensor failure, go to error" in every sub-state
Hierarchical FSMs are also called Harel statecharts (after their inventor, David Harel). They're used in automotive, aerospace, and industrial robotics because they scale to thousands of states.
Entry and Exit Actions
You can run code when entering or exiting a state:
def on_enter_NAVIGATING(self):
self.planner.set_goal(self.current_mission.target)
self.start_time = time.now()
def on_exit_NAVIGATING(self):
self.planner.cancel()
elapsed = time.now() - self.start_time
self.log(f"Navigated for {elapsed}s")
Entry actions are perfect for initialization (start a timer, load a map, publish a status message).
Exit actions are perfect for cleanup (stop motors, log telemetry, release resources).
When State Machines Excel
State machines are ideal when:
- Your robot has distinct modes (idle, moving, charging, error)
- Transitions are event-driven (user presses button, sensor detects obstacle)
- You need guaranteed behavior in each state (safety-critical systems)
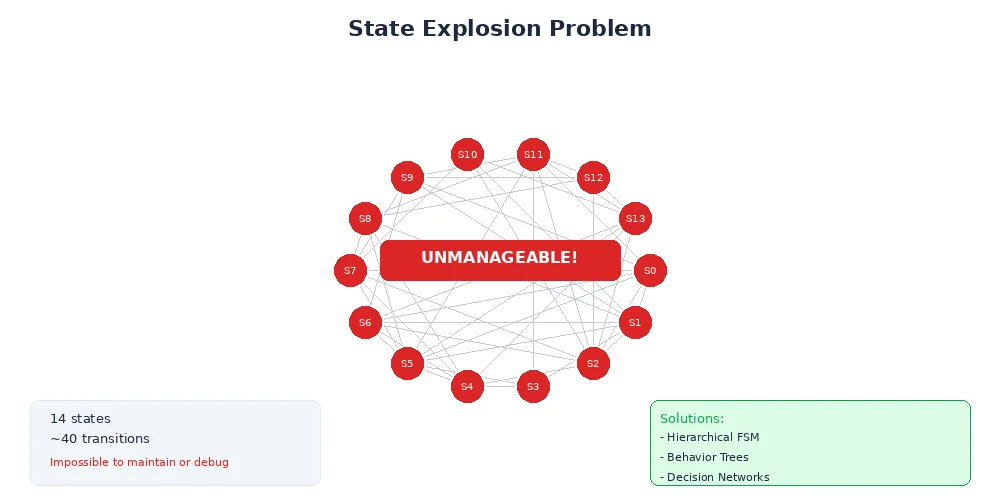
They're less ideal when:
- You have many small, independent behaviors running in parallel
- Behavior needs to be composed from reusable pieces
- Transitions depend on complex logic rather than simple guards
That's where behavior trees come in (next lesson).
What's Next?
State machines give you clear, testable, structured behavior. But what if you have many small behaviors that need to run in parallel or be composed? That's where behavior trees shine. In the next lesson, we'll explore behavior trees and how they differ from state machines.